
Kavraki Lab doctoral students Constantinos Chamzas, Zachary Kingston and Carlos Quintero-Pena, together with Rice Department of Computer Science faculty members Anshumali Shrivastava and Lydia Kavraki, presented their new paper "Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High Dimensions" at the 2021 IEEE International Conference on Robotics and Automation (ICRA). The paper was nominated for the Best Paper Award in Cognitive Robotics.
Lydia Kavraki is the Noah Harding Professor of Computer Science and Anshumali Shrivastava is associate professor in Rice University’s Department of Computer Science.
ICRA is the world’s largest annual robotics conference. This year it took place in a hybrid format online and in Xi’an, China from May 30 to June 5, 2021.
The Kavraki Lab team presented SPARK and FLAME, experience-based frameworks for sampling-based planning. The team’s approaches can be trained incrementally and improve performance with only a handful of examples, generalizing better over tasks and environments compared to prior approaches.
Earlier work by doctoral student Constantinos Chamzas has shown that reusing experience from prior motion planning problems can improve the efficiency of similar, future motion planning queries. However, for robots with many degrees of freedom, these methods exhibit poor generalization across different environments and often require large datasets that are impractical to gather.
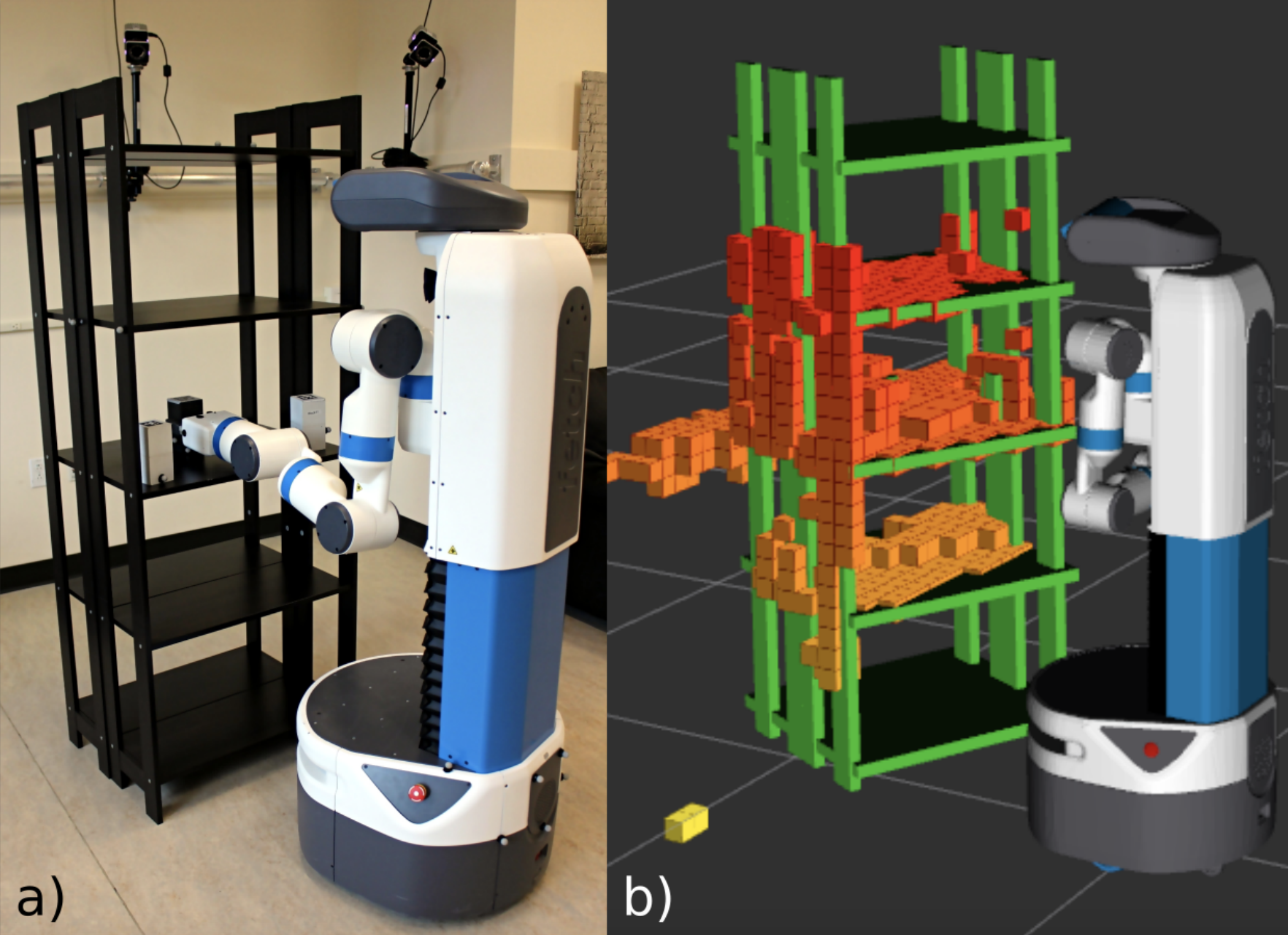
The SPARK and FLAME frameworks are applicable to complex manipulators in 3D environments. Both combine samplers associated with features from a workspace decomposition into a global biased sampling distribution. SPARK decomposes the environment based on exact geometry while FLAME is more general, and uses an octree-based decomposition obtained from sensor data. The team demonstrated the effectiveness of SPARK and FLAME on a Fetch robot tasked with challenging pick-and-place manipulation problems.
In addition to the Kavraki Lab’s work on robotics, artificial intelligence and machine learning, the team also conducts research in computational biomedicine. In fact, for certain problems in that domain, the team uses approaches inspired by robotics. Kavraki recently received a three-year, $1.2M National Institutes of Health U01 grant to develop new approaches to model and analyze protein-ligand interactions in cancer research. She also received the 2020 Pioneer Award from the IEEE Robotics and Automation Society as well as the ACM-AAAI Allen Newell Award.
Slides from the ICRA 2021 presentation are available to view. Read the publication here.